Most amateur astronomers are familiar with the idea of a Barn Door tracker or some similar. Building a simple tracking device requires nothing more than a hinge (such as from a barn door), two pieces of wood and screw that can be turned.
Building a Tangent Arm tracker is very simple and only involves a few steps and materials.
Tangent Arm Tracker
· ¼” MDF board
· Heavy Duty Hinge
· Screws
· 20 Thread Per Inch ¼” Threaded Rod
· ¼” Bolt
· ¼” Nut Cap
· Counter Weights
Construction Steps
1) Using a suitably sized hinge, connect two pieces of wood.
2) Drill a hole about 2/3 of the way from the hinge.
3) Set a nut into the hole and glue it in place (I used a simple two part epoxy but any metal/wood glue will work).
4) Thread a coupler through the net.
5) Attach a crank to the end of the coupler.
You now have a simple Tangent Arm tracker. The downside to this design is that if the coupler is turned at a constant rate the angular velocity, the rate the hinge opens, will not be constant. To track for long periods of time (more than about 30 seconds) the rate the hinge opens must equal the sideral rate. With a Tangent Arm Tracker this requires the screw to turn at ever increasing rates (and limits practical tracking to about 3 hours).
A simple DC motor could be attached to the coupler but adjusting the rotation rate is very difficult. Fortunately I came up with an alternative! A list of the materials I used for the Smart Tracker are below:
Computer
Assisted Controller
·
Raspberry Pie
·
Adafruit Motor Control Board
·
Stepper Motor – NEMA size 17
·
Stepper Motor Axle Coupler
·
¼” MDF board
Using a Raspberry Pi connected to a Stepper Motor I wrote a simple Python Script that allowed the motor rotation rate to speed up to allow the hinge to open at a constant angular rate. The Python Code I used is below:
If you want the Python Code you can download it
here.
Depending on the specifics of your Tracker the given code will cause the motor to increase its rotation too quickly or too slowly. Fortunately, with a bit of trial and error that is easy to correct. The number that is circled in Red controls the rate of motor increase. By increasing or decreasing it (and saving the code after each change) you can tweak the code for any individual mount.

The photo to the left shows the Tracker with my DSLR camera attached using a simple Bogen Ball. The motor is just visible at the bottom of the picture.
Once I had the motor connected to the Raspberry Pi, I had to align the Tracker. In the same way the Polar Axis of an Equatorial Mount must be pointed at the pole, the Hinge Axis of the Tracker should be pointed as close to the pole as possible. A simple polar scope or sight would be a nice addition but all I did was take an series of 10 images and use them as a quasi-drift alignment.
The first image series, shown below, was done without the motor on. All images were taken with a Canon xTi with a 200 mm lens.
Calibration Image
This series allowed me to test how effective the motor was and adjust both the polar alignment and the motor drive rate. There are three pictures, spaced out over 3 minutes. During that time the star moved approximately 1/2 across the field of view of my DSLR camera.
First Tracking Attempt
After turning the motor on I superimposed the previous series on the second series. The angle between the Sidereal Motion and the second series allowed me to estimate how much I needed to move the polar axis as well as quantify both the on and off axis motion. Next I adjusted the pointing of the axis and slightly increased the rate the motor was turning at.
Final Tracking Attempt
After several interation of this procedure (which really only took about 20 minutes, not including the last imaging series which was 30 minutes) I ended up with the series shown in white (these are actually the same star but are coloured differently to so they are easily distinguished). The three red stars are the original reference series which shows the sidereal motion of a star over the course of three minuets. When the Tracker is turned on, the white stars shows the same motion of the star over 30 minutes.
After all is said and done, I decided this was as good as I was going to get. The polar alignment was great and RA drift ended up being sufficient for exposures of less than 5 minutes with a focal length of 200 mm. Obviously as the focal length decreases the exposure length can increase.
The image below is of Orion and was taken using the Tracking Rig described. Its made up of 5 x 3 minute exposures at 100 mm at ISO 800.
This led me to the one major draw back of my design. Because it uses a Raspberry Pi it requires a computer monitor and keyboard as well as an AC power supply. This can present a number of problems for Amateur Astronomers. However, a simple solution would be to use an Arduino instead of an R-Pi. However, as of yet I haven't had the time to do that.
Best of luck to all and feel free to email me with any questions.
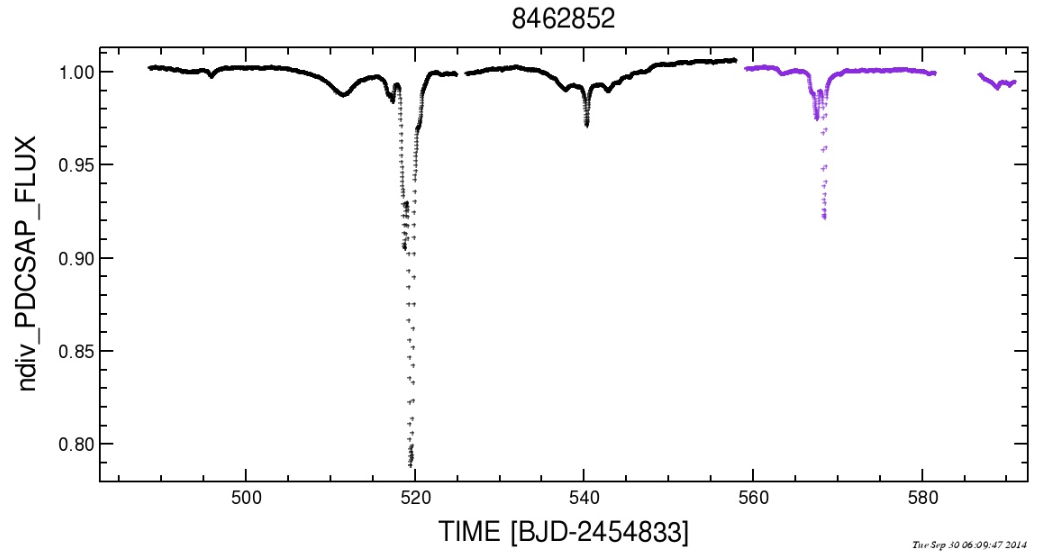
 In September 2015 a star in Cygnus was observed by the Kepler Satellite; unlike the millions of other stars observed in the Kepler field of view this star demonstrated a very unique light curve. And unlike many of the interesting transits found by Kepler the first identification was done by Citizen Scientists on planethunters.org. This marked a major milestone for crowd sourced science and provided an amazing collaboration between professional and amateur scientists.
In September 2015 a star in Cygnus was observed by the Kepler Satellite; unlike the millions of other stars observed in the Kepler field of view this star demonstrated a very unique light curve. And unlike many of the interesting transits found by Kepler the first identification was done by Citizen Scientists on planethunters.org. This marked a major milestone for crowd sourced science and provided an amazing collaboration between professional and amateur scientists.